
offene Bachelor- und Masterarbeiten
Der Lehrstuhl Automatisierungstechnik und Prozessinformatik hat ständig interessante Themen anzubieten. Auch wenn Sie auf dieser Seite kein für Sie geeignetes Angebot finden:
Sprechen Sie unsere Mitarbeiter an!
Eine kleine Auswahl an zu vergebenen Themen ist hier zu finden:
| Typ | Thema | Betreuer |
|---|---|---|
| Masterarbeit | Modellierung, Identifikation und Regelung (plasmagetriebener Prozesse) | Christian Wölfel |
| Masterarbeit | Intervallbeobachtung | Fabian Schneider |
Masterarbeit
Modellierung, Identifikation und Regelung (plasmagetriebener Prozesse)
 Plasmagetriebene Oberflächenbehandlung
Plasmagetriebene Oberflächenbehandlung
Zur Erzeugung von Dünnfilmen, wie sie beispielsweise in der optischen Industrie benötigt werden, stehen heutzutage plasmagetriebene Abschei-deverfahren zur Verfügung. Bei diesen wird in einem Vakuumprozess mit-tels einer Plasmaentladung eine dünne Feststoffschicht auf einem Zielob-jekt aufgetragen. Beim Auftragen dielektrischer Feststoffschichten kann ei-ne Selbstvergiftung des Prozesses auftreten, welche den Abscheidevor-gang verlangsamt. Zudem sind die Schichteigen-schaften während des Abscheideprozesses nicht direkt messbar.
Aufgabenstellung
Um Steuerungsmethoden für diese plasmagetriebenen Verfahren zu entwickeln, werden geeignete Modelle und Identifikationsmethoden benötigt. Hierzu existieren bereits gut dokumentierte Vorarbeiten, welche erfolgreich als Basis für Steuerungsentwürfe eingesetzt werden. Die vorhandenen Grundlagen im Bereich der Modellierung und Identifikation können nun für die Verwendung anderer Ein- und Ausgangsgrößen angepasst und anschließend erprobt werden.
Im Bereich der Entwicklung von Regelungsmethoden wurde sich bisher auf einfache Regelstrukturen wie PID-Regler beschränkt. Um auch höhere Güteforderungen zu erfüllen, sollen nun erweiterte Reglerstrukturen entwickelt und erprobt werden. Auch die Anwendung modernster Sensorik, wie der Multipol-Resonanz-Sonde, um neuartige Regelkreise aufzubauen, ist ein möglicher Schwerpunkt für eine Aufgabenstellung.
Die konkrete Aufgabenstellung für eine Masterarbeit setzt sich daher aus einem oder einer Kombination der skizzierten Themenbereiche (Modellierung, Systemidentifikation, Instrumentierung, Reglerentwurf) zusammen. Aufgrund der Breite der Palette an möglichen inhaltlichen Schwerpunkten für eine Masterarbeit und sich weiterentwickelnder Forschungs-arbeiten am Lehrstuhl wird die konkrete Aufgabenstellung in Absprache mit dem Studierenden festgelegt. Dabei wird auch berücksichtigt, ob die Arbeit methodisch oder experimentell bzw. regelungstechnisch oder physikalisch ausgerichtet sein soll.
Voraussetzungen
- Inhalte der regelungstechnischen Pflichtvorlesungen werden solide beherrscht
- selbstständiger Umgang mit MATLAB/Simulink hinsichtlich regelungstechnischer Inhalte
- Bereitschaft für eine organisierte Arbeitsweise zur Lösung regelungstechnischer Probleme
Kontakt: Christian Wölfel

Masterarbeit
Intervallbeobachtung
 Intervallwertige Zustandsbeobachtung
Intervallwertige Zustandsbeobachtung
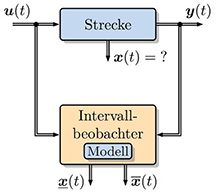
Luenberger-Beobachter dienen dazu, den nicht direkt messbaren Zustand
x(t) eines dynamischen Systems, basierend auf einem Modell, den Messgrößen y(t) und den Stellgrößen u(t), zu schätzen. Liegen Modellunsicherheiten oder Störungen vor, so kann daraus ein Fehler in der Zustandsschätzung resultieren.
Intervallbeobachter (siehe Abbildung) stellen eine Erweiterung dar und erzeugen eine untere Schranke x(t) und eine obere Schranke x(t), wobei der Streckenzustand x(t) garantiert in dem Intervall [x(t), x(t)] liegt. Da diese Intervalle auch im Fall von Unsicherheiten den Zustand eines dynamischen Systems garantiert einschließen können, handelt es sich bei der intervallwertigen Zustandsbeobachtung um ein besonders praxistaugliches Konzept.
Aufgabenstellung
Für bestimmte Klassen von Systemen existieren bereits ausgearbeitete Entwurfsmethoden, welche z.B. zu stabilen Intervallbeobachtern führen. Ausgehend davon sind Erweiterungen denkbar, welche im Rahmen von Abschlussarbeiten thematisiert werden können. Beispielsweise wird zusätzlich eine geringe Breite des geschätzten Zustandsintervalls, welches den tatsächlichen Streckenzustand garantiert einschließt, angestrebt.
Die konkrete Aufgabenstellung wird in Absprache mit dem Studierenden festgelegt und beinhaltet eine klar umgrenzte Fragestellung. Der Schwerpunkt der Abschlussarbeit kann auf eines der beiden Aufgabenbereiche gelegt werden.
- Implementierung und Analyse: Simulationsstudien und Erprobung vorhandener Methoden.
- Entwurfsmethoden: Anpassung und Erweiterung vorhandener Entwurfsmethoden.
Voraussetzungen
- Inhalte der jeweiligen regelungstechnischen Vorlesungen werden solide beherrscht.
- Selbstständiger Umgang mit MATLAB/Simulink hinsichtlich regelungstechnischer Inhalte.
- Bereitschaft für eine organisierte Arbeitsweise zur Lösung regelungstechnischer Probleme.
Kontakt: Fabian Schneider